ATLAS
ALTAIR research projects
ATLAS
AuTonomous intraLuminAl Surgery


Joint Doctoral Degree Program
ATLAS is a Marie Curie European Joint Doctorate school that targets the training of experts in a very specific branch of Robotic Surgery: Intraluminal Surgery.
The project is coordinated by the University of Leuven and implemented by a consortium of seven Universities and many industrial partners, including the University of Verona.
About
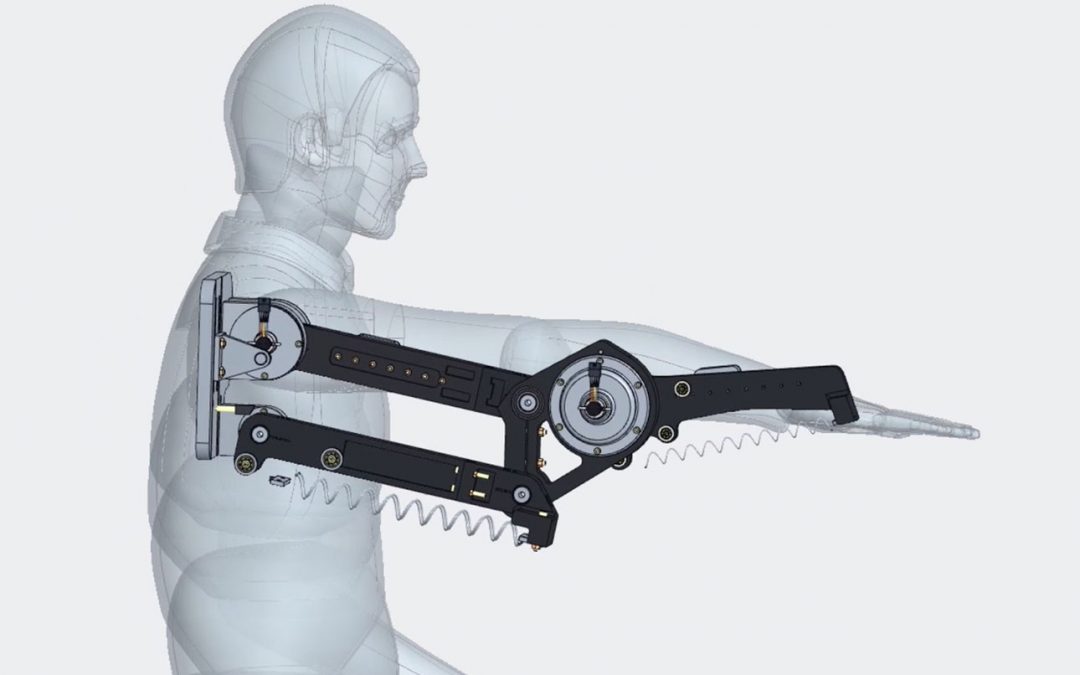
ATLAS stands for “AuTonomous intraLuminAl Surgery”. Intraluminal navigation, a particularly challenging branch, reappears in many minimal invasive surgical (MIS) interventions that rely on steering flexible instruments through fragile lumens or vessels.
Project Objectives
The project will develop smart flexible robots that autonomously propel through complex deformable tubular structures. This calls for seamless integration of sensors, actuators, modeling and control. By engaging in this ambitious research topic, participants will be exposed to all aspects of robotics.
While contributing to the state of the art, they will become proficient in building, modeling, testing, interfacing in short in integrating basic building blocks into systems that display sophisticated behavior.
A Joint Doctoral Degree Program
A Joint doctorate is a doctoral path designed by two institutions. The Ph.D. fellow works towards a single unique doctoral thesis and will be awarded a joint diploma signed and stamped by both the institutions. Since ATLAS is an MSCA project, two institutions from different countries collaborate and design a joint doctoral degree for all the fellows involved. Fellows are required to conduct their doctoral research activities jointly supervised by two different academic universities. The MSCA project along with a joint doctoral degree provides an excellent international environment to collaborate and work towards a unified objective.
Marie Skłodowska-Curie Actions Fellowship and Innovative Training Network (MSCA-ITN)
MSCA are a set of major research fellowships created by the European Union/European Commission to support research in the European Research Area (ERA). Established in 1996 as Marie Curie Actions and known since 2014 as Marie Skłodowska-Curie Actions, they aim to foster the career development and further training of researchers at all career stages.
MSCA fellowship is one of the most prestigious fellowships in all of Europe. An MSCA project generally consists of many partners both from the industry and academia from all over Europe which provides an international environment. Each MSC fellow has the requirement of following so-called “secondments” in the location of other project partners. “Secondment” requirement presents an MSC fellow an enjoyable opportunity to visit, learn, and collaborate with experts from other partnering institutions in the project.
Innovative training network (ITN)
ITN events are an integral part of all MSCA projects. These training events, organized periodically by different partnering organizations, are a fantastic forum for networking and explore collaboration possibilities with experts in your respective field. In addition, MSC fellows are required to convey the general knowledge of their research to a non-academic audience. Above all, the chance to work in a team of all the Ph.D. fellows of the project towards a common goal to solve one of the grand challenges is extremely interesting and exciting.
In my view, MSCA-ITN fellowship provides an exciting opportunity to excel in academic research in addition to exposure to industrial applications and business potential. I believe the fellowship would provide international exposure and a platform to interact with the leading researchers through facilitating conference and events mobility and connect to a network of peers interested in similar ideas.
ALTAS is a wonderful opportunity for me to contribute to research in surgical robotics and AI, and a chance to realize the output of my research by building an end-to-end solution. Additionally, MSCA-ITN fellowship with its reputation, international exposure, collaboration, and a very generous funding provides an amazing platform for academic excellence and overall development.
ATLAS Rocks!!!🤘
ALTAIR People involved



ALTAIR projects
Altair research is carried on with the help of EU and Italian grants, discover our research projects!