robotic surgery
introduction
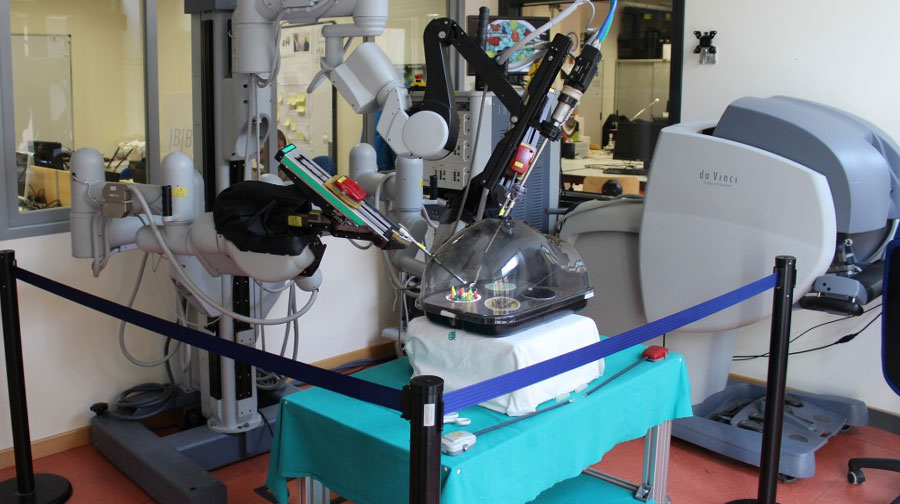
Over the last decade, Robot-assisted Surgery has become a common feature of many operating rooms mainly in the form of teleoperated minimally invasive surgery. In certain interventions, robotic surgery has become the “golden standard”, defining the best practice for that procedure.
Although the effective clinical outcome of robotic surgery as been questioned, as compared to the equivalent laparoscopic procedure performed by top surgeons, the introduction of robots in the operating theatre has raised the average quality of the interventions and made procedures less fatiguing for surgeons.
Control of surgical robots
The research in ALTAIR in this field focuses on fast computational algorithms for haptics, high performance software architectures and control algorithms for teleoperation, advanced simulation environments for robotic surgery planning and training. Of particular interest are the aspects of patient safety and system modularity.
Teleoperation and haptics
Teleoperated systems are devices that allow human operators to interact with remote environments: this is quite important in case of hazardous environments (e.g. nuclear waste disposal) and challenging/critical environments (e.g. space, deep water, surgical robotics). The key point in any teleoperated system is the design of a distributed control architecture: a controller at the master side where the operator is interacting with the haptic devices and another controller at the slave side where the slave robot is interacting with the environment.
Such control architecture has to be stable (i.e., no vibrations and divergent behavior are allowed) and should give high fidelity under any operating conditions and for any environment parameters. In a teleoperation system there are three main unknowns: the operator model, the environment model and the communication channel behavior when no dedicated network is used. On top of that there are the classic challenges of any sample-data systems: quantization, delays due to numerical integration schemes, interactions between the discrete-time subsystems and the continuous-time subsystems, measurement noises, exogenous disturbances, etc.
medical imaging and vision in robotics
The team at the Altair Robotics Lab is involved in computer vision research to support the medical procedures and in techniques specifically applied to surgery and robotic assisted surgery. Our particular focus is on developing real-time algorithms for computing the 3D geometry and motion of the anatomy, surgical camera and instruments, and for combining this information with preoperative and intra-operative imaging modalities and other surgical sensors. The challenge is to find solutions which are robust to the non-rigid and highly dynamic nature of the surgical site and the complex requirements of the surgical procedure and the operating theatre. We have extensive expertise in medical image software that deals with medical image computing, tomography, and medical image real-time acquisition devices such as ultrasound data. Our interest is to help to bring state of the art techniques to operating room for minimally invasive and robotic assisted surgery. By translating computational methods and technology into the operating room we may enable less invasive and more accurate surgical procedures that improve healthcare outcomes and benefit the patient.

Gallery and selected publications



Selected Publications
Maris, B. and Fiorini, P., “Retrospective study on phantom for the application of medical image registration in the operating room scenario”, Biomed 2016, 15-16th February, Innsbruck.
Ferraguti, Federica; Preda, Nicola; Manurung, Auralius; Bonfe, Marcello; Lambercy, Olivier; Gassert, Roger; Muradore, Riccardo; Fiorini, Paolo; Secchi, Cristian, “An Energy Tank-Based Interactive Control Architecture for Autonomous and Teleoperated Robotic Surgery”, «IEEE TRANSACTIONS ON ROBOTICS» , vol. 31 , n. 5 , 2015 , pp. 1073-1088.
Ferraguti, Federica; Preda, Nicola; De Rossi, Giacomo; Bonfe, Marcello; Muradore, Riccardo; Fiorini, Paolo; Secchi, Cristian, “A Two-Layer Approach for Shared Control in Semi-Autonomous Robotic Surgery”, Proceedings of “European Control Conference (ECC)”, Linz, Austria, July 15-17, 2015 , 2015, pp. 747-752.
Muradore, R.; De Rossi, G.; Bonfe’, M.; Preda, N.; Secchi, C.; Ferraguti, F.; Fiorini, P., “Autonomous Execution of Surgical Tasks: the Next Step in Robotic Surgery”, Proceedings of “Hamyln Symposium on Medical Robotics”, London, UK , June 20-23, 2015 , 2015, pp. 83-84.
Muradore, Riccardo; Fiorini, Paolo; Akgun, Gokhan; Barkana, Duygun Erol; Bonfe, Marcello; Boriero, Fabrizio; Caprara, Andrea; De Rossi, Giacomo; Dodi, Riccardo; Elle, Ole Jakob; Ferraguti, Federica; Gasperotti, Lorenza; Gassert, Roger; Mathiassen, Kim; Handini, Dilla; Lambercy, Olivier; Li, Lin; Kruusmaa, Maarja; Manurung, Auralius Oberman; Meruzzi, Giovanni; Nguyen, Ho Quoc Phuong; Preda, Nicola; Riolfo, Gianluca; Ristolainen, Asko; Sanna, Alberto; Secchi, Cristian; Torsello, Marco; Yantac, Asim Evren, “Development of a Cognitive Robotic System for Simple Surgical Tasks”, «INTERNATIONAL JOURNAL OF ADVANCED ROBOTIC SYSTEMS», 2015, pp. 1-20.
D. Bresolin; L. Geretti; R. Muradore; P. Fiorini; T. Villa, “Formal Verification Applied to Robotic Surgery”, Coordination Control of Distributed Systems, Springer, 2015, pp. 347-355.
Bresolin, Davide; Geretti, Luca; Muradore, Riccardo; Fiorini, Paolo; Villa, Tiziano, “Formal verification of robotic surgery tasks by reachability analysis”, «MICROPROCESSORS AND MICROSYSTEMS» , vol. 39 , n. 8 , 2015 , pp. 836-842.
Dall’Alba, D. and Fiorini, P.; “BIPCO: ultrasound feature points based on phase congruency detector and binary pattern descriptor”, Int J CARS, 2015.
Marcello Bonfe’; Nicola Preda; Cristian Secchi; Federica Ferraguti; Riccardo Muradore; Luisa Repele; Giovanni Lorenzi; Paolo Fiorini, “Distributed Control Architecture for Automated Surgical Task Execution with Coordinated Robot Arms”, Proceedings of “19th World Congress The International Federation of Automatic Control” , Cape Town, South Africa , August 24-29, 2014 , 2014 , pp. 10213-10218.
B.M. Maris, P. Fiorini, “Generalized Shapes and Point Sets Correspondence and Registration”, Journal of Mathematical Imaging and Vision, 2014.
Schreiter, D. Bresolin, M. Capiluppi, J. Raczkowsky, P. Fiorini, H. Woern. “Application of Contract-based verification techniques for Hybrid Automata to Surgical Robotic Systems”. In Proceedings of the 13th European Control Conference (ECC), 24-27 Giugno 2014, Strasbourg, Francia.
Perrone, F. Nessi, E. De Momi, F. Boriero, M. Capiluppi, P. Fiorini, G. Ferrigno. “Ontology-based modular architecture for surgical autonomous robots”. In Proceedings of The Hamlyn Symposium of Medical Robotics 2014, 13-14 Luglio 2014, Londra, UK.
Boriero, M. Capiluppi, R. Muradore, P. Fiorini. “Task Ontology Validation in Surgical Robotics”. In proceedings of 4th Joint Workshop on New Technologies for Computer/Robot Assisted Surgery (CRAS), 14-15 Ottobre 2014, Genova, Italia.
Kim Mathiassen; Diego Dall’Alba; Riccardo Muradore; Paolo Fiorini; Ole Jakob Elle, “Real-time biopsy needle tip estimation in 2D ultrasound images”, Proceedings of “IEEE International Conference on Robotics and Automation”, Karlsruhe, Germany , 6-10 May 2013 , 2013 , pp. 4363-4369.
E. De Momi, R. Perrone, L. Schreiter, J. Raczkowsky, F. Boriero, M. Capiluppi, P. Fiorini. “EuRoSurge Workflow: From ontology to surgical task execution”. In proceedings of the 3rd Joint Workshop on New Technologies for Computer/Robot Assisted Surgery (CRAS), 11-13 Settembre 2013, Verona, Italia.
M. Capiluppi, L. Schreiter, P.Fiorini, J. Raczkowsky and H. Woern. “A Fault Analysis Procedure for Surgical Robotic Systems”. In Proceedings of The Hamlyn Symposium of Medical Robotics 2013, 22-25 Giugno, Londra, UK.
M. Capiluppi, L. Schreiter, P. Fiorini, J. Raczkowsky, H. Woern. “Modeling and Verification of a Robotic Surgical System using Hybrid Input/Output Automata”. In Proceedings European Control Conference (ECC) 2013, 17-19 Luglio, Zurigo, Svizzera.
M. Bonfe; F. Boriero; R. Dodi; P. Fiorini; A. Morandi; R. Muradore; L. Pasquale; A. Sanna; C. Secchi, “Towards automated surgical robotics: A requirements engineering approach”, Proceedings of “IEEE International Conference on Biomedical Robotics and Biomechatronics”, Roma , 24-27 June 2012 , 2012 , pp. 56-61.
Dall’Alba, D.; Maris, B.; Fiorini, P.; “A compact navigation system for free hand needle placement in percutaneos procedures”, Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on, Vilamoura, Portugal.
Bogdan Maris, Debora Botturi, Paolo Fiorini; “A geometric approach to improve performance of a collision detection algorithm derived from GJK and LC algorithms”, IASTED International Conference on Computer Graphics and Imaging -CGIM 2011, Innsbruck, Austria.
Muradore R.; Bresolin D.; Geretti L.; Fiorini P.; Villa T., “Robotic surgery”, «IEEE Robotics and Automation Magazine», vol. 18 , n. 3 , 2011 , pp. 24-32.
Bogdan Maris, Debora Botturi, Paolo Fiorini; “Trajectory planning with task constraints in densely filled environments”, 2010, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Taipei, Taiwan.
Botturi D.; Fiorini P.; Muradore R.; Quaglia D., “Simulation of networked control systems with applications to telerobotics”, Proceedings of “European Control Conference (ECC)”, Budapest, Hungary, 23-26 Aug., 2009 , 2009, pp. 1481-1486.