ALTAIR research projects
FORECAST
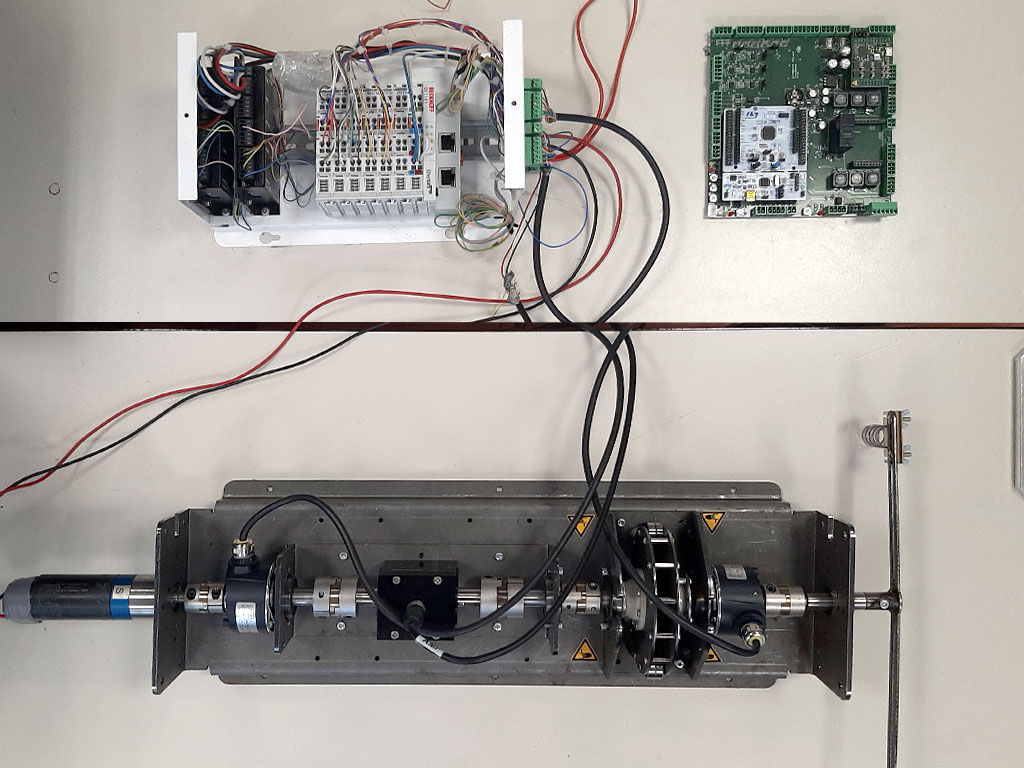
Force control algorithm testbench
Timing
Start 1 January 2018
End 31 December 2021
Granted by

The FORECAST project focuses on benchmarking force control algorithms for robotic locomotion applications such as exoskeletons and humanoids. Force control algorithms allow robots to adapt their movements to the surrounding environment and to delicately (softly) interact with humans. This characteristic is fundamental in the increasingly frequent scenarios of collaboration between human and robot (eg rehabilitative or assistive robotics) or in the case of uncertain environments (eg disaster recovery).
As a result, tools will be developed to help robot designers choose the best force control algorithms and to define standardized metrics for their evaluation.
The FORECAST project is funded by the European Union, Horizon 2020 research and innovation programme, through an Open Call issued by the EUROBENCH Project.
The EUROBENCH project aims at creating the first benchmarking framework for robotic systems in Europe.
The Forecast Ecosystem
The AcRobotica Team



Rudy Vicario
Research Assistant

Noè Murr
Research Assistant


Matteo Meneghetti
Research Assistant


Guglielmo Zanni
Research Assistant
ALTAIR projects
Altair research is carried on with the help of EU and Italian grants, discover our research projects!