Videogallery - Exoskeletons and Assistive Robots
This page provides a simple and accessible description of the main results of our research on Exoskeletons and Assistive Robotics.
This video shows how our transparency algorithms can enhance the transparency of a collaborative robot. The algorithm makes the robot softer, smoother, lighter, and more sensitive for interaction with humans.

This video presents the results of the ASSOLOIST project. An Italian project funded by Regione Veneto and European Socal Fund. We designed control algorithms and a compact tabletop exoskeleton designed to support upper limb movement during Activities of Daily Living (ADLs). Ideal for users with reduced mobility, it offers non-invasive, seated assistance for tasks like eating, drinking, manipulating objects or self-care.

Across our research, we developed an innovative methodology (patented) based on surface electromyography (EMG), able to provide high assistance levels to muscular dystrophy patients without oscillations or jerky, unnatural motion. In this video, we demonstrate how the system can support a subject affected by muscular dystrophy. Due to myopathy, the individual is unable to lift his arm autonomously. The reduction in muscular strength is so severe that residual muscle forces are extremely limited. Moreover, the presence of adipose tissue—resulting from sarcopenia—further impairs the propagation of the myoelectric signal, making it extremely noisy and difficult to decode. Despite these challenges, the proposed solution can assist the patient naturally and seamlessly, as if the robot is a natural extension of his body, enabling to lift objects of unknown weight, such as a bottle of water.

This video presents an adaptive EMG-driven gravity compensation algorithm that automatically adjusts the level of assistance based on the muscular activation of the biceps and triceps. One of the key features of the approach is its ability to work in synergy with the human and to automatically adapt to the operator’s needs: both the human and the robot work towards the same goal in a synergistic manner, creating a system of human-in-the-loop optimization. The video shows how the system significantly reduces the muscular activation of a healthy subject, providing nearly full assistance during movement. This level of performance and high assistance is not achievable with other methods in the literature (e.g., proportional EMG-based approaches).
Dimo, E., Costanzi, D., Pascucci, F., & Calanca, A. (2025). Myography-Based Adaptive Gravity Compensation Strategies for Powered Upper-Limb Exoskeletons. Submitted
Preliminary testing of our new modular exoskeleton for industrial applications. This video shows the active elbow and passive shoulder modules in transparency control. Realized with the support of Plumake srl.

Preliminary testing of our new modular exoskeleton for industrial applications. This video shows the semiactive active shoulder modules with energy-free gravity compensation capability. Realized with the support of Plumake srl.

Preliminary testing of our new modular exoskeleton for industrial applications. This video shows the semi-active shoulder module with myography-based control. Realized with the support of Plumake srl.

This video presents an innovative actuation concept that we have named AGtuator (Anti-Gravity actuator), capable of compensating for gravitational forces acting on a robotic link without energy consumption. The system can be reconfigured for different loads and is not intended merely as a gravity compensation mechanism. It is capable of generating arbitrary force profiles by dynamically reconfiguring the spring according to the required forces. This is a truly unconventional force control system, whose theoretical stability properties are analyzed in the following article:
Pascucci, F., Dimo, E., & Calanca, A. A Semi-Active Actuator for Adjustable Gravity Compensation. Submitted

This video presents a friction compensation system developed for benchmarking applications. While it demonstrates unmatched robustness (passivity), it requires precise knowledge of the mechanical characteristics of the interacting system—an assumption that holds in benchmarking scenarios but not in real-world applications. The above video, however, shows an equivalent solution that eliminates the need for prior knowledge. The system operates effectively under unknown environmental conditions.
Dimo, E., & Calanca, A. (2024). Environment Aware Friction Observer with Applications to Force Control Benchmarking. Actuators, 13(53).

This video shows experimental tests on the AGADEXO industrial exoskeleton, developed by AGADE s.r.l. It is one of the first active shoulder exoskeletons to be commercialized and used in industrial contexts. For a detailed evaluation of its effectiveness, see the following article:
Pascucci, F., Feola, E., Cesari, P., & Calanca, A. (2025). Evaluation of a Semi-Active Upper-Limb Exoskeleton while Performing Material Handling Tasks. IEEE Transactions on Medical Robotics and Bionics.

This video presents robotic assistance experiments for a muscular dystrophy patient: Davide Costanzi. Davide, currently a post-doctoral researcher in our lab, is both the designer and the user of the system. The video shows that while traditional gravity compensation approaches offer good usability, they fail to cope with unknown external loads. Alternative approaches based on surface electromyography allow Davide to lift arbitrary loads. This is because the EMG signal originates from Davide’s brain, which is highly adaptable to the surrounding context. Unfortunately, the EMG signal is very noisy and neuromuscular delays may cause oscillations, limiting the system usability.
D. Costanzi, M. Gandolla, and A. Calanca, “Towards Personalized Myoelectric Control Strategies,” in 2023 IEEE International Conference on Metrology for eXtended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), 2023, p. 6.

This video presents a possible solution to the non-collocation problem. Typically, the presence of dynamics—such as those introduced by gear reducers—between the actuator and the force sensor imposes significant limitations on the choice of control gains. It is well known that increasing the force control gains can lead to oscillations and instability, especially when interacting with environments of varying stiffness. The solution demonstrated in the video shows that it is possible to achieve very high force gains in contact with both extremely rigid and highly compliant environments.
The manuscript is in preparation and builds upon the results presented in A. Calanca and P. Fiorini “A Rationale for Acceleration Feedback in Force Control of Series Elastic Actuators” IEEE Transactions on Robotics

This video presents a possible kinematic solution for extending our robotic concept (shown in the video below) to multiple degrees of freedom and functional tasks. By introducing an additional elbow degree of freedom, the system preserves its passive gravity compensation capabilities across three dimensions.
Article in progress

This video presents the implementation of a rehabilitation system which learn the rehabilitation trajectories set by th therapist. It is developed based on th exoskeleton described in the video below.
Palazzi et al., “An Affordable Upper-Limb Exoskeleton Concept for Rehabilitation Applications,” Technologies, vol. 10, no. 1, p. 22, 2022.

This video shows the development of an ultra-low-cost rehabilitative exoskeleton. The mechanical design implements gravity compensation using elastic elements to substantially reduce motor requirements and their cost (saving approximately €1500 per joint). The 3D-printed links allow for the inclusion of affordable force sensors (saving around €1000 per joint). The system features a smart mechatronic architecture which lead to high-performance force control, aiming to gently and precisely assist the user.
Calanca, E. Dimo, E. Palazzi, L. Luzi, “Enhancing Force Controllability by Mechanics in Exoskeleton Design,” Mechatronics, vol. 86, 2022.

This video shows an experimental setup developed by two students during a university project. It is a single-link robotic system with torque control capabilities comparable to those of high-end industrial systems. The system was built using a plastic link and low-cost electronics. The design is inspired by a concept we called Series Elastic Link (SEL), described in the following article.
Calanca, E. Dimo, R. Vicario, P. Fiorini, M. Serpelloni, and G. Legnani “Introducing Series Elastic Links for Affordable Torque-Controlled Robots” Robotics and Automation Letters, vol. 4, no. 1, pp. 137–144, 2019.

This video presents examples of impedance control on a Series Elastic Actuator (SEA). In simple terms, these algorithms allow to virtually modify the system’s stiffness. Although the physical system has an elastic constant K1, it behaves as if it had a different stiffness K2. The ability to impose an arbitrary elastic constant K2 while maintaining system stability enables to virtualize the “softness” of a robotic system. This technology may be considered speculative, but is actually the foundation of nearly all the videos on this page. One of our related publications is:
Calanca, R. Muradore, P. Fiorini “Impedance Control of Series Elastic Actuators: Passivity and Acceleration-Based Control” Mechatronics, vol. 47, pp. 37–48, 2017.

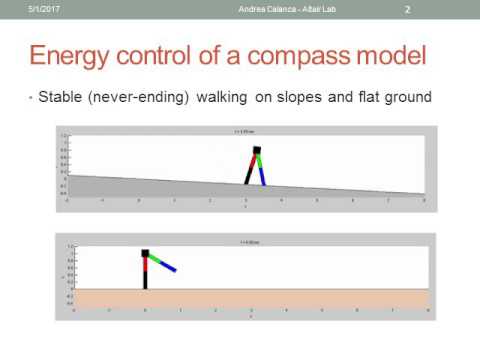
This video presents an extremely simple control algorithm capable of initiating the gait of a simplified biped model. The most interesting aspect of this work is that the algorithm enables the emergence of a locomotor pattern from the passive dynamics of the system. This work is related to the development of lower-limb exoskeletons.